Project 3.2.1: SMART CAR PARKING SYSTEM
| Description | This project demonstrates a smart car parking system using an ultrasonic sensor, RGB, a servo motor, and an Arduino Uno. The ultrasonic sensor detects approaching vehicles and checks parking space availability, the LEDs indicate the parking status, and the servo motor automatically controls the opening and closing of the parking gate. |
|---|---|
| Use case | This project can be used in automated parking lots where the system detects incoming vehicles, shows available parking spaces using RGB, and automatically opens or closes the gate using a servo motor for controlled access. |
Components (Things You will need)
 |
 |
 |
 |
 |
 |
 |
|---|---|---|---|---|---|---|
Building the circuit
Things Needed:
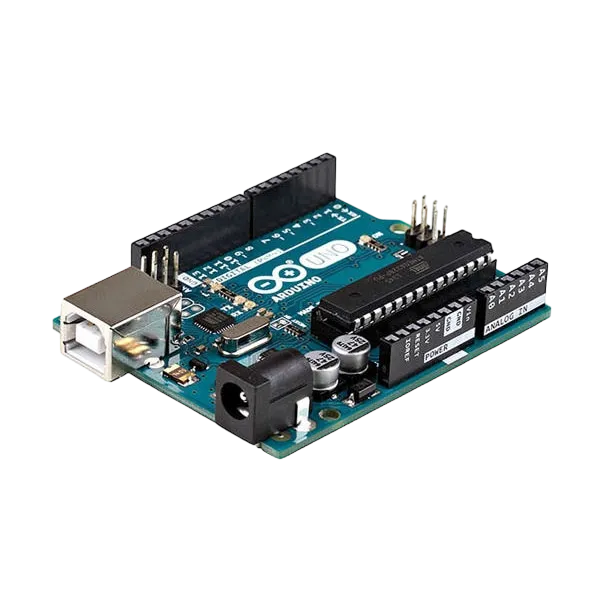
- Arduino Uno
- Ultrasonic sensor
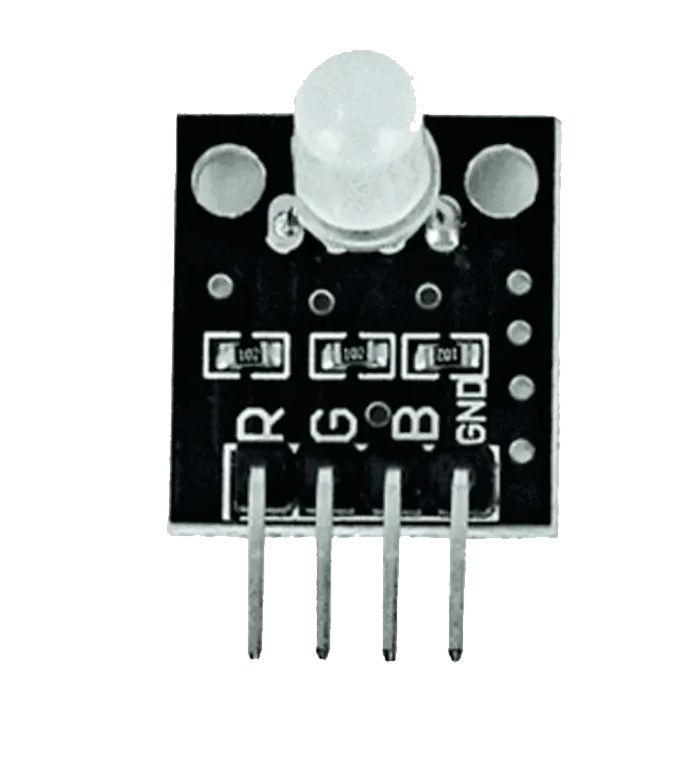
- RGB module
- Servo motor
- Breadboard
- Jumper wires
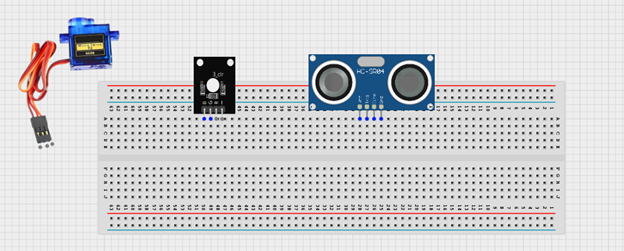
Mounting the component on the breadboard
Step 1: Insert the ultrasonic sensor into the breadboard. Then place the rgb light module beside it, ensuring all the pins are properly inserted and firmly connected.
 .
.
WIRING THE CIRCUIT
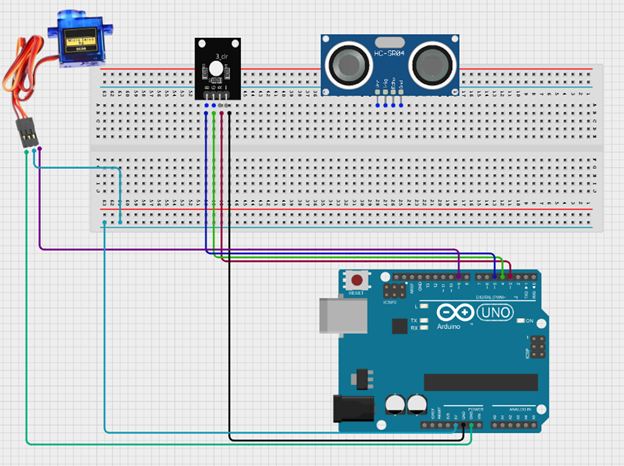
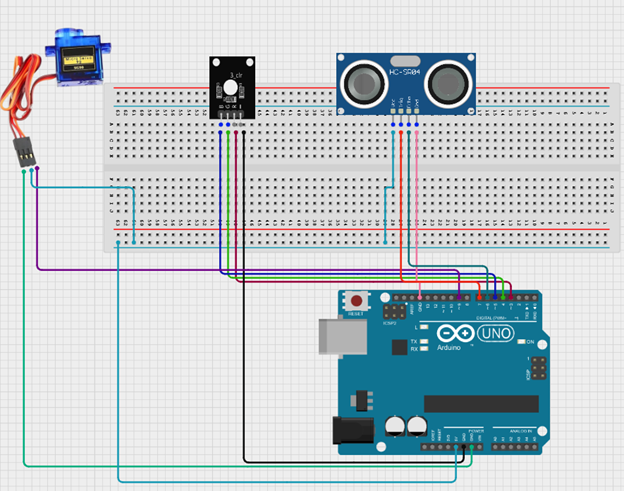
Step 2: Connect the RGB module to the Arduino Uno by linking the Red pin to Digital Pin 3, the Green pin to Digital Pin 4, the Blue pin to Digital Pin 5, and the GND pin to GND using jumper wires. Then connect the servo motor by attaching its signal pin to Digital Pin 9, the VCC pin to 5V, and the GND pin to GND on the Arduino Uno.
 .
.
Step 3: Connect the ultrasonic sensor to the Arduino Uno by linking the VCC pin to 5V, the GND pin to GND, the TRIG pin to Digital Pin 7, and the ECHO pin to Digital Pin 6 using jumper wires as shown in the circuit setup.
 .
.
PROGRAMMING
Step 1: Open your Arduino IDE. See how to set up here: Getting Started.
Step 2: Type the following code in your arduino IDE at the top of "void setup() { }" function as shown in the picture below.
``` cpp
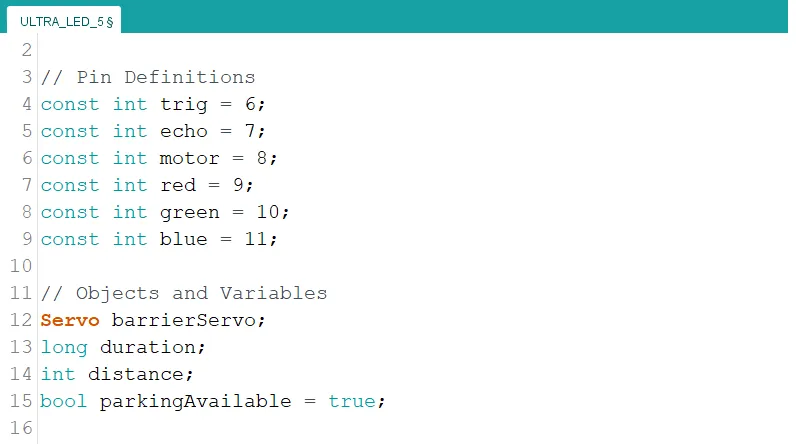
#include
// Objects and Variables Servo barrierServo; long duration; int distance; bool parkingAvailable = true; ```
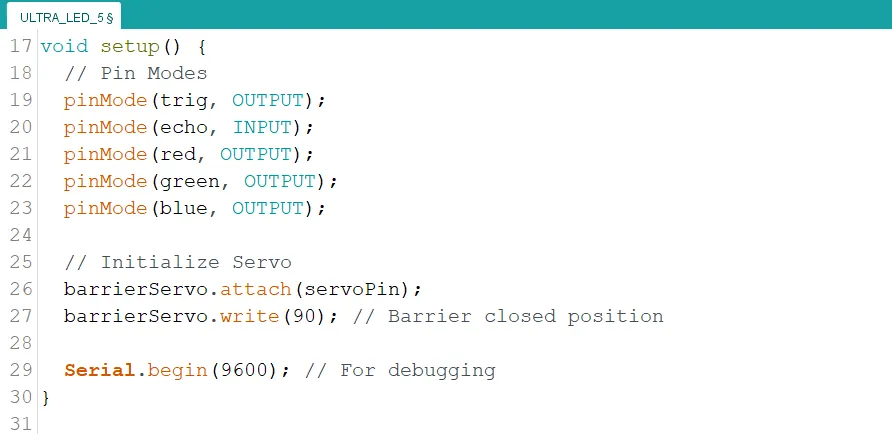
Step 3: Type the following code inside of the "void setup() { }" function to initialize the pin modes
``` cpp // Pin Modes pinMode(trig, OUTPUT); pinMode(echo, INPUT); pinMode(red, OUTPUT); pinMode(green, OUTPUT); pinMode(blue, OUTPUT);
// Initialize Servo barrierServo.attach(servoPin); barrierServo.write(90); // Barrier closed position
Serial.begin(9600); // For debugging ```
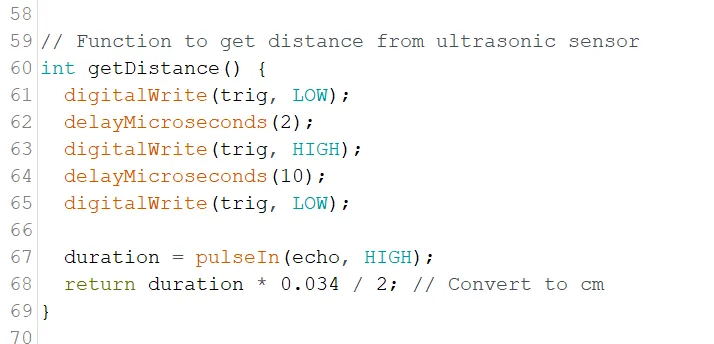
Step 4: Type the following code under "void loop() { }" function. This code is a function to calculate the distance of objects from the ultrasonic sensor.
``` cpp // Function to get distance from ultrasonic sensor int getDistance() { digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
return duration * 0.034 / 2; // Convert to cm
} ```
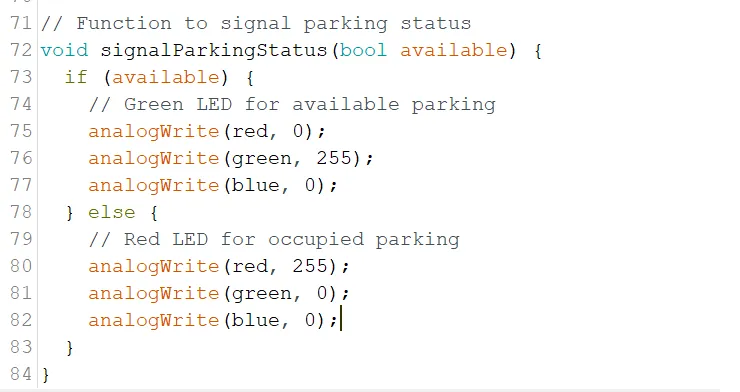
Step 5: Type the following code under the new function. This code is a function to control the color of the RGB module to indicate parking availability.
c++
// Function to signal parking status
void signalParkingStatus(bool available) {
if (available) {
// Green LED for available parking
analogWrite(red, 0);
analogWrite(green, 255);
analogWrite(blue, 0);
} else {
// Red LED for occupied parking
analogWrite(red, 255);
analogWrite(green, 0);
analogWrite(blue, 0);
}
}
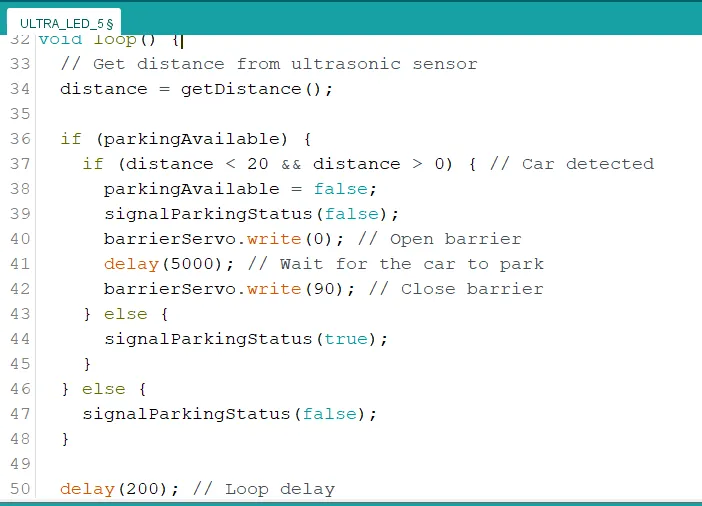
Step 6: Type the following code inside of the "void loop() { }" function.
``` cpp // Get distance from ultrasonic sensor distance = getDistance();
if (parkingAvailable) { if (distance < 20 && distance > 0) { // Car detected parkingAvailable = false; signalParkingStatus(false); barrierServo.write(0); // Open barrier delay(5000); // Wait for the car to park barrierServo.write(90); // Close barrier } else { signalParkingStatus(true); } } else { signalParkingStatus(false); }
delay(200); // Loop delay ```
Step 7: Save your code. See the Getting Started section
Step 8: Select the arduino board and port See the Getting Started section:Selecting Arduino Board Type and Uploading your code.
Step 9: Upload your code. See the Getting Started section:Selecting Arduino Board Type and Uploading your code
CONCLUSION
This project demonstrated how an ultrasonic sensor, RGB LED, and servo motor can be used together to create a smart car parking system. It helped in understanding how distance detection can control visual indicators and automate a gate system, improving parking management and efficiency.